



The submit talks about a self locking worm gear system for hoisting heavy loads by means of an electrical motor. The major function of the system being its self locking in an event of a motor malfunction.
The asked for concept appears more mechanical by nature than electronic, so it turns into crucial to talk about the mechanical portion elaborately first.
The offered remote managed bicycle hoist mechanism requires one essential function to be contained in the system, which can be undoubtedly essential for most pulley based hoist mechanisms, it's the self locking feature to stop reverse unrolling of the pulley in an event of a motor breakdown.
An extremely useful method of applying the self locking characteristic is as simple as using a worm gear system, as might be observed in the image below.
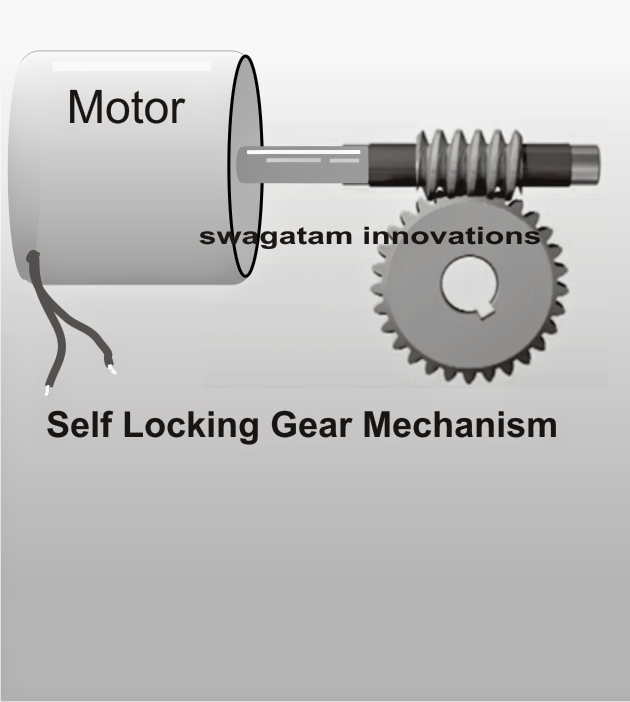
Here we observe a horizontal spiral drill bit formed shaft with its teeth locked within the teeth of a normal circular gear wheel. Now, as the spiral gear is rotated by way of a motor its teeth tend to push and roll in the forward motion pushing the teeth of the circular gear in an exact direction leading to a synchronized rotation of the lower circular gear.
The circular gear is a common which is often used for raising or moving the load and in case the motor goes wrong because of power failure or any other interruption, the spiral gear makes certain that the circular gear teeth get locked across the spiral gear teeth and evolves into virtually motionless under such circumstances.
This theory is exactly what can make a worm gear system recommended for the suggested bicycle hoist mechanism.
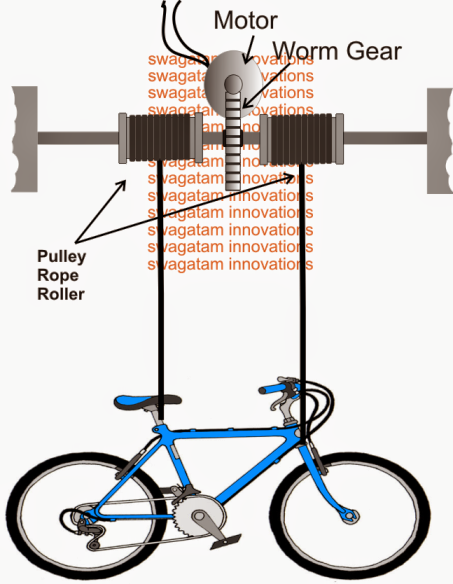
The following diagram exhibits to the technique wherein the above described worm gear mechanism might be executed in between parallel supports and with the aid of two adjacent rope and pulley assembly.
As per a visual demonstration it might be observed that whenever the motor is actuated, the gear assembly begins moving in a particular fixed direction such that the load is pulled upwards by means of coiling of the rope around the two adjacent pulleys, the reverse occurs when the motor direction is flipped.
The central rod which can be noticed supported (pivoted) over firm structures on either side ought to be improved with sealed ball bearing rings to be able to allow a smooth rotation of the whole system.

The NEXT publish will give details of ways the above mechanical design could possibly be regulated by way of a RF remote control unit
