The servomotor driver and tester unit might excite two types of electronic enthusiasts namely model vehicle owners and robotic system builders.
As shown in the diagram, the circuit equips a standard 555 or 7555 timer chip. This IC is configured so that the circuit can drive two or more servomotors simultaneously.
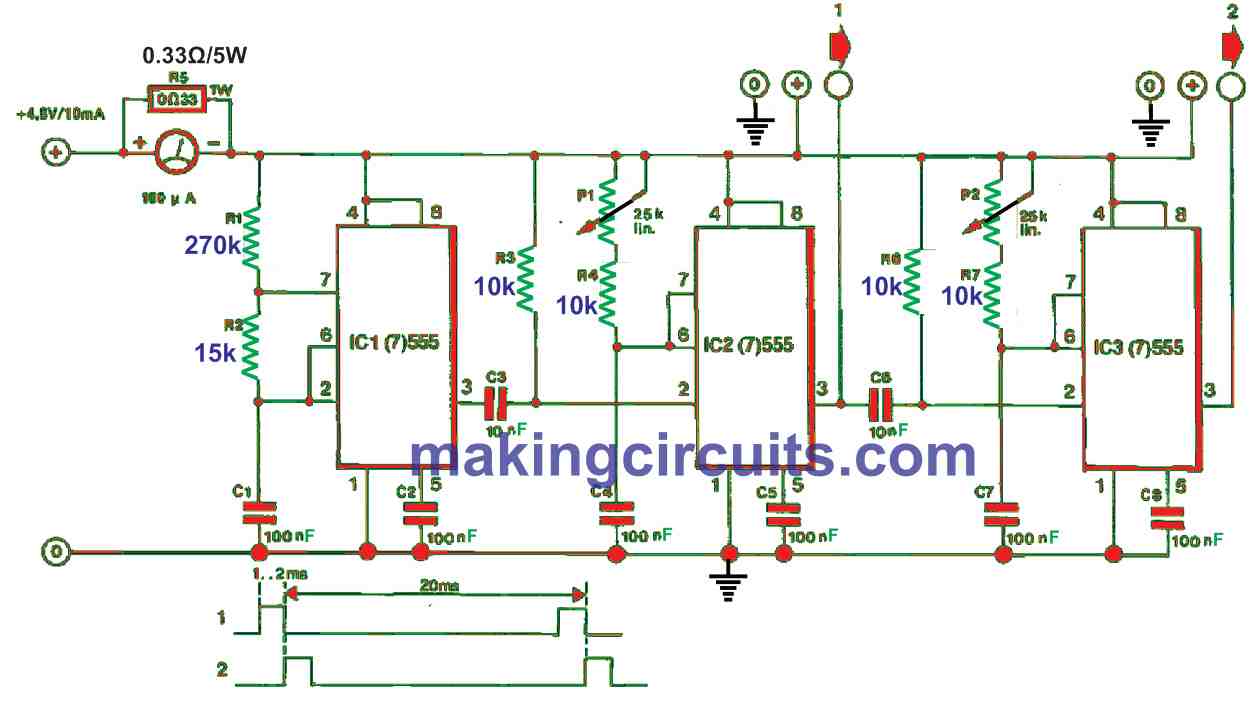
You may also notice the second and third stages of the circuit are exact. IC1 acts as an unstable multivibrator whose output pulse period time is set using the formula:
T = 0.639(R1 + R2)C
The displayed values for the associated timing sections will eventually deliver a pulse period time of around 20 ms at pin 3 of IC1.
The square wave’s rising edge activates IC2 which is monostable. The output pulse width of IC2 can be regulated with P1.
The series connection of P1 and R4 warrants a huge pulse width range for almost all servo motors which usually need around 1 or 2 ms of activation pulse widths.
The second servo control stage is the same as the configuration of IC2 and 8 other activated stages of the 555 timers.
To cater to the motor’s angular and linear positions, each of the servo control potentiometers is recommended to be fitted with a standard scale to view its relative indication.
How to Test Servo-Motor Current
To monitor the total current consumption of the connected servomotors, an ammeter is connected in series with the positive supply line. Moreover, the ammeter detects when one or more servos gets stuck.
The servo motor test circuit itself consumes negligible current, compared to the total current consumption with motor as identified on the meter.
The value is about 3 mA for each 555-type timer in the row. In case 7555-type timers are utilized, the current drawn is much lower than 3 mA. Therefore, it may be viable to convert the tester into a portable, NiCd battery-powered device.
Leave a Reply